
近日,机器人技术领域最有影响力的国际学术会议之一ICRA2021在中国西安召开,澳门太阳网城官网工程力学系副教授马道林获得本次大会最高荣誉——最佳会议论文奖。


此次马道林副教授的获奖论文题为: “基于触觉测量的相对运动跟踪和外部接触感知” (Extrinsic Contact Sensing with Relative-Motion Tracking from Distributed Tactile Measurements)。 评奖委员会认为:“The paper makes a notable contribution to the important and re-emerging field of tactile perception by solving the problem of contact localization between an unknown held by an imprecise grasp and the unknown environment with which it is in contact. This paper represents an excellent theory-to-practice exercise as the novel proposal of using extrinsic tactile array data to infer contact is verified with a new tactile sensor and real robotic manipulation in a simplified, but realistic environment. The authors also provide a robust and honest discussion of results, both positive and negative, for reader evaluation.”
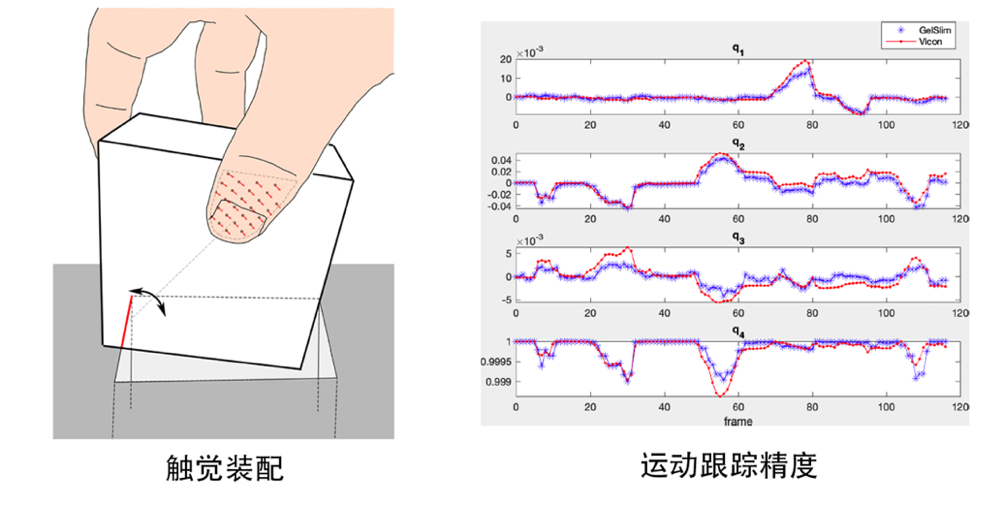
图 1 触觉装配与高精度触觉运动跟踪
马道林介绍,人类在执行插入或装配任务时是如何利用手指触觉的,是一个开放性难题。申请人发现基于触觉的运动跟踪是手指精确感知和控制接触行为的关键。如图1所示,申请人首次实现了对被抓取物体基于触觉的高精度运动跟踪(测量精度可与当下商用最精确的非接触运动跟踪系统之一的VICON的测量精度相当)。
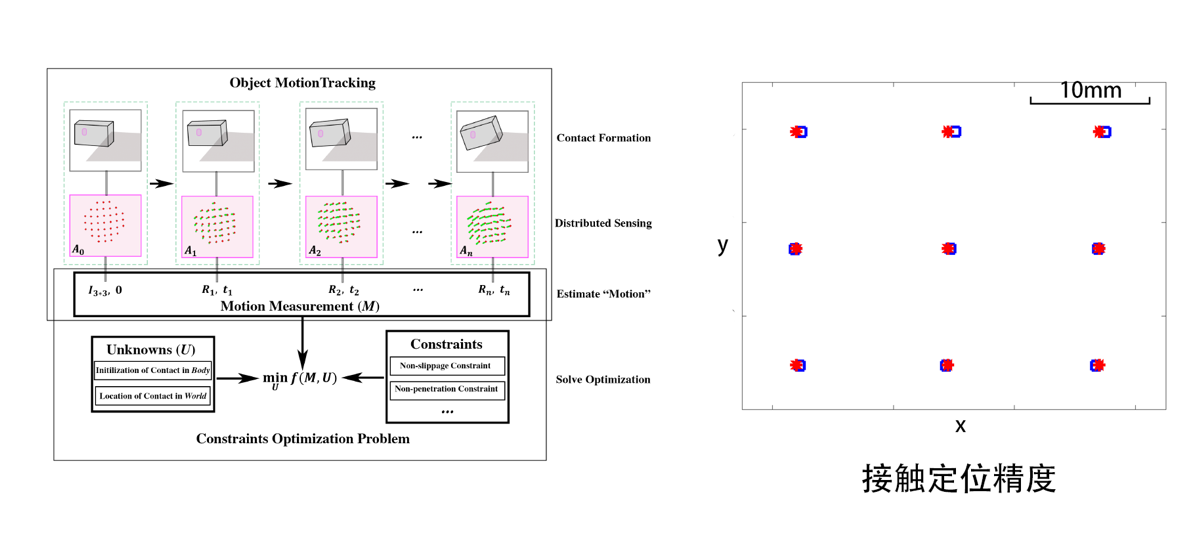
图 2 外部接触感知理论框架与及定位精度
基于运动跟踪的能力,进一步提出了”外部接触感知“理论框架,实现了依靠触觉定位机器人执行自动化装配等富含接触操作任务中物体与外部环境的接触位置,如图2。 上述能力为实现触觉伺服控制提供了关键的状态估计信息,为智能机器人进一步精确控制接触行为铺平道路。同时,传统触觉传感器的开发只专注于接触力的测量,而本研究在崭新的测量维度(运动跟踪)上展示了触觉感知对智能机器人的价值,因此可以指引触觉传感器功能开发及优化的新方向。未来,我们将继续专注于以接触感知与控制为核心的机器人操作研究。”
马道林现为上海交大澳门太阳网城官网工程力学系副教授,主要从事机器人操作及触觉感知与控制领域的前沿研究工作,曾荣获2017年Amazon机器人挑战赛Stow Task冠军和Amazon机器人最佳系统论文奖。 ICRA(International Conference on Robotics and Automation)由IEEE(Institute of Electrical and Electronics Engineers)主办,历史悠久,许多机器人和自动化领域最重要的革新最初都是在ICRA上面世。随着机器人和自动化在社会经济方面的影响越来越大,ICRA也越来越倾向于增加以产业化为中心的活动和内容。 IEEE ICRA 最佳会议论文奖(始于 1993 年)选出年度 IEEE 机器人与自动化国际会议(ICRA)中最杰出的论文,今年ICRA共收到4056篇投稿论文,从中遴选出4篇进入最终入围名单,并最终有1篇论文获得最佳论文奖。



